GPIO
1. GPIO 子系统
GPIO(通用输入/输出)是一种通用引脚,可以由微控制器(MCU)或 CPU 控制,具有多种功能,包括高低电平输入检测和输出控制。在 Linux 中,GPIO 引脚可以被导出到用户空间,通过 sysfs 文件系统进行控制,使得 GPIO 引脚可以用于各种用途,如串口通信、I2C、网络通信、电压检测等。
在 Linux 中,有一个专门的 GPIO 子系统驱动框架,用于处理 GPIO 设备。通过这个框架,用户可以轻松地与 CPU 的 GPIO 引脚进行交互。这个驱动框架支持将引脚用于基本的输入和输出功能,同时输入功能还支持中断检测。这使得开发者可以利用 GPIO 子系统轻松地将 GPIO 引脚用于各种用途,实现了灵活性和可编程性。有关 GPIO 子系统的更多详细信息可以在 <Linux内核源码>/Documentation/gpio 目录中找到。
2.GPIO 控制(shell)
2.1 引脚分布
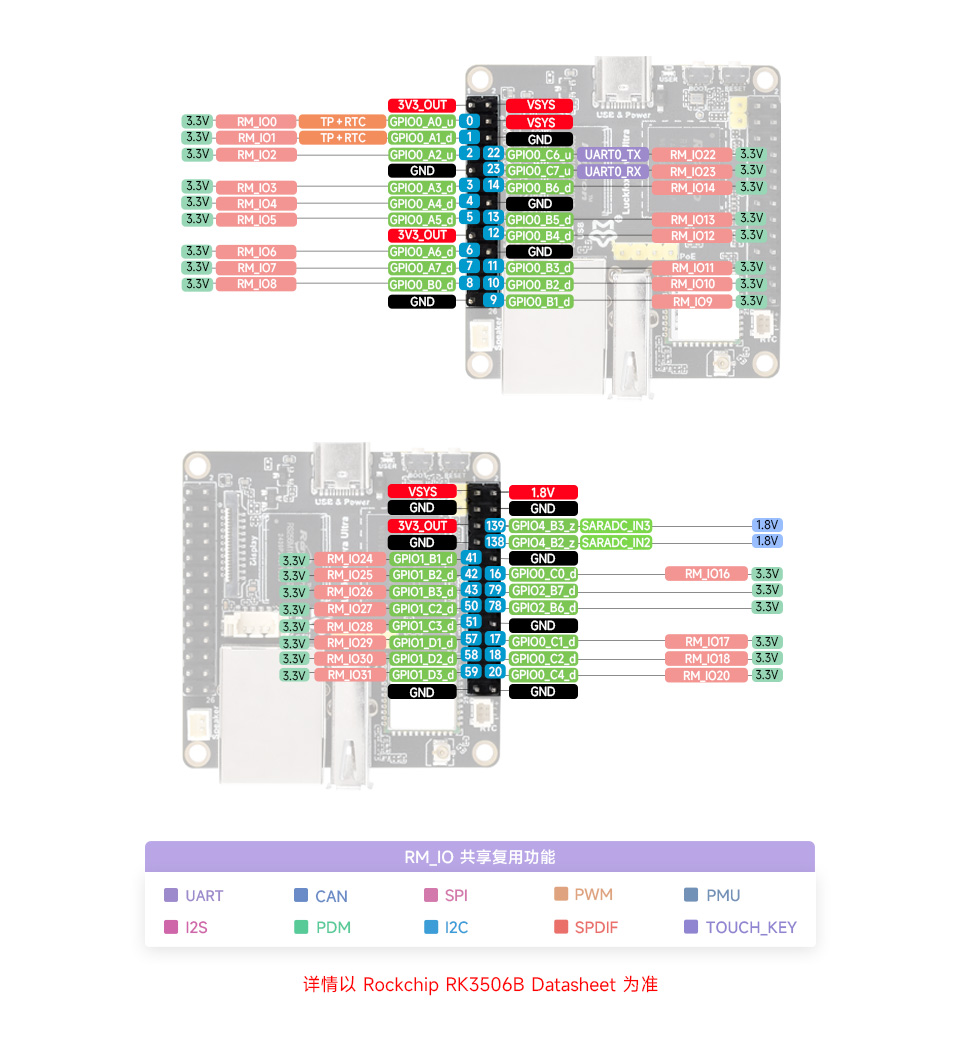
在将 GPIO 引脚导出到用户空间时,通常需要用到引脚编号,我们可以通过接口图进行确定。更多详细功能请参考《资料下载》 Datasheet 手册。
- Luckfox Lyra Ultra/Ultra W 引脚图:
2.2 GPIO 编号计算
GPIO对应的引脚编号均在引脚图中标出,您可以直接使用或按照下面方法进行计算。
GPIO 有5个 bank:GPIO0~GPIO4,每个 bank 分为4组,共有32个 pin:A0~A7, B0~B7, C0~C7, D0~D7
GPIO 的命名方式为 GPIO{bank}_{group}{X},如下所示:
GPIO0_A0 ~ A7
GPIO0_B0 ~ B7
GPIO0_C0 ~ C7
GPIO0_D0 ~ D7
GPIO1_A0 ~ A7
....
GPIO1_D0 ~ D7
....
GPIO4_D0 ~ D7GPIO 编号计算方法如下:
GPIO 引脚编号计算公式:pin = bank * 32 + number
GPIO 组内编号计算公式:number = group * 8 + X
综上:pin = bank * 32 + (group * 8 + X)以 GPIO1_B1_d 为例说明,其中:
bank:1group:1 (A=0, B=1, C=2, D=3)X:1
所以 GPIO1_B1_d 的引脚编号为:1 x 32 + ( 1x 8 + 1) = 41
2.3 使用 GPIO sysfs 接口控制 I/O
将 GPIO 控制从内核空间导出到用户空间(只写)。
sudo su
echo 41 > /sys/class/gpio/export取消 GPIO 控制从内核空间到用户空间的导出(只写)。
echo 41 > /sys/class/gpio/unexport
2.3.1 设备目录和设备属性
当你写入 GPIO 编号到
/sys/class/gpio/export时,内核会将这个 GPIO 导出到用户空间,使之可以通过/sys/class/gpio/gpio<编号>目录来进行后续操作(如配置方向、设置或读取电平)。root@luckfox:/home/luckfox# ls /sys/class/gpio
export gpio41 gpiochip0 gpiochip128 gpiochip32 gpiochip509 gpiochip64 gpiochip96 unexport在 /sys/class/gpio/gpioN(N=1,2,3,5,...)设备目录下有多种属性,可以通过这些属性控制,从而实现对 GPIO 的控制。
cd /sys/class/gpio/gpio41
root@luckfox:/sys/class/gpio/gpio41# ls
active_low device direction edge power subsystem uevent valuedirection属性:设置 GPIO 的输入(in)或输出(out)value属性:用于读取输入电平或者控制输出电平,写入或者读取到1表示高电平,写入或者读取到0表示低电平edge属性:用于设置触发电平,只有将 GPIO 设置为中断的时候才会出现和使用这个属性- 上升沿触发:rising
- 下降沿触发:falling
- 双边沿触发:both
- 禁用中断:none
2.3.2 控制 GPIO 引脚电平
设置方向。
root@luckfox:/sys/class/gpio/gpio41# pwd # 确保自己在想控制的设备目录下
/sys/class/gpio/gpio41
echo out > direction # 设置 GPIO 为输出
echo in > direction # 设置 GPIO 为输入设置
value属性来控制 GPIO 电平。#输出
echo 1 > value
echo 0 > value
# 输入
cat value注意:可能遇到的错误:
root@luckfox:~# echo 22 > /sys/class/gpio/export
bash: echo: write error: Device or resource busy- Linux 驱动调试中可能遇到 gpio 无法申请的问题,需要查找 gpio 被哪个驱动占用
mount -t debugfs none /media
cat /media/gpio
root@luckfox:~# cat /media/gpio
gpiochip0: GPIOs 0-31, parent: platform/ff940000.gpio, gpio0:
gpiochip1: GPIOs 32-63, parent: platform/ff870000.gpio, gpio1:
gpio-32 ( |work-led ) out lo
gpio-46 ( |cd ) in lo IRQ ACTIVE LOW
gpiochip2: GPIOs 64-95, parent: platform/ff1c0000.gpio, gpio2:
gpiochip3: GPIOs 96-127, parent: platform/ff1d0000.gpio, gpio3:
gpiochip4: GPIOs 128-159, parent: platform/ff1e0000.gpio, gpio4:- 还可以看 IOMUX 的输出值,如果输出为 0,当前引脚被复用成 GPIO 功能,否则就复用其它功能
# GPO0_C6 默认是调试串口
root@luckfox:~# iomux 0 22
mux get (GPIO0-22) = 1
3. 使用 Python 程序控制 I/O
控制一颗 LED 交替闪烁。
#!/usr/bin/python3
from periphery import GPIO
import time
LED_Pin = 41
LED_GPIO = GPIO(LED_Pin, "out")
while True:
try:
LED_GPIO.write(True)
time.sleep(0.5)
LED_GPIO.write(False)
time.sleep(0.5)
except KeyboardInterrupt:
LED_GPIO.write(False)
break
except IOError:
print ("Error")
LED_GPIO.close()运行程序:
chmod 777 gpio.py
./gpio.py
4.控制GPIO(C程序)
在前文中,我们演示了如何使用 echo 命令和 Python 程序控制GPIO。实际上也可以使用 vi 编辑器对文件进行修改,修改时需注意用户权限。此外,我们还可以使用C库函数或系统调用来读写设备文件,以达到控制设备的目的。请注意,为了在特定的嵌入式系统上运行程序,通常需要使用交叉编译工具来编译代码,以生成可在目标开发板上执行的可执行文件。接下来,让我们一起探讨具体的实施步骤。
4.1 完整代码
通过以下程序,可以实现 GPIO 引脚的电平控制。
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
int main() {
int gpio_pin;
printf("Please enter the GPIO pin number: ");
scanf("%d", &gpio_pin);
FILE *export_file = fopen("/sys/class/gpio/export", "w");
if (export_file == NULL) {
perror("Failed to open GPIO export file");
return -1;
}
fprintf(export_file, "%d", gpio_pin);
fclose(export_file);
char direction_path[50];
snprintf(direction_path, sizeof(direction_path), "/sys/class/gpio/gpio%d/direction", gpio_pin);
FILE *direction_file = fopen(direction_path, "w");
if (direction_file == NULL) {
perror("Failed to open GPIO direction file");
return -1;
}
fprintf(direction_file, "out");
fclose(direction_file);
char value_path[50];
char cat_command[100];
snprintf(value_path, sizeof(value_path), "/sys/class/gpio/gpio%d/value", gpio_pin);
snprintf(cat_command, sizeof(cat_command), "cat %s", value_path);
FILE *value_file = fopen(value_path, "w");
if (value_file == NULL) {
perror("Failed to open GPIO value file");
return -1;
}
for (int i = 0; i < 3; i++) {
fprintf(value_file, "1");
fflush(value_file);
system(cat_command);
sleep(1);
fprintf(value_file, "0");
fflush(value_file);
system(cat_command);
sleep(1);
}
fclose(value_file);
FILE *unexport_file = fopen("/sys/class/gpio/unexport", "w");
if (unexport_file == NULL) {
perror("Failed to open GPIO unexport file");
return -1;
}
fprintf(unexport_file, "%d", gpio_pin);
fclose(unexport_file);
return 0;
}
4.2 导出引脚到用户空间
这段代码通过读取用户输入的引脚编号,打开 /sys/class/gpio/export 文件,并写入该编号,实现了 GPIO 引脚的导出操作。
printf("Please enter the GPIO pin number: ");
scanf("%d", &gpio_pin);
FILE *export_file = fopen("/sys/class/gpio/export", "w");
if (export_file == NULL) {
perror("Failed to open GPIO export file");
return -1;
}
fprintf(export_file, "%d", gpio_pin);
fclose(export_file);
4.3 配置GPIO方向
这段代码通过打开 /sys/class/gpio/gpiox/direction 文件,并写入 "out",确保了 GPIO 引脚被设置为输出模式。如需配置为输入模式,则写入 “in”。
char direction_path[50];
snprintf(direction_path, sizeof(direction_path), "/sys/class/gpio/gpio%d/direction", gpio_pin);
FILE *direction_file = fopen(direction_path, "w");
if (direction_file == NULL) {
perror("Failed to open GPIO direction file");
return -1;
}
fprintf(direction_file, "out");
fclose(direction_file);
4.4 控制引脚输出电平
这段代码用于控制 GPIO 引脚的电平。首先,需要打开 /sys/class/gpio/gpiox/value 文件,该文件用于设置 GPIO 引脚的电平值。在一个循环中,我们通过向文件依次写入 “1” 和 “0” 实现对引脚的控制,再调用 cat 命令查看 value 中存储的值,检查是否写入成功。
注意,标准C库通常使用缓冲区来提高文件操作的效率,而不是每次写入都立即将数据写入磁盘文件。这就意味着,尽管你调用了 fprintf 来写入数据,数据实际上可能会被暂时保存在缓冲区中,并且不会立即写入文件。如果你希望确保数据被立即写入文件,你可以使用 fflush 函数来刷新缓冲区,这样可以强制将缓冲区中的数据写入文件,或每次都使用 fopen->fprintf->fclose 的方式写入。
char value_path[50];
char cat_command[100];
snprintf(value_path, sizeof(value_path), "/sys/class/gpio/gpio%d/value", gpio_pin);
snprintf(cat_command, sizeof(cat_command), "cat %s", value_path);
FILE *value_file = fopen(value_path, "w");
if (value_file == NULL) {
perror("Failed to open GPIO value file");
return -1;
}
for (int i = 0; i < 3; i++) {
fprintf(value_file, "1");
fflush(value_file);
system(cat_command);
sleep(1);
fprintf(value_file, "0");
fflush(value_file);
system(cat_command);
sleep(1);
}
fclose(value_file);
4.5 取消导出引脚
这段代码通过打开 /sys/class/gpio/unexport 文件,并写入 GPIO 引脚的编号,实现了 GPIO 引脚的取消导出操作。
FILE *unexport_file = fopen("/sys/class/gpio/unexport", "w");
if (unexport_file == NULL) {
perror("Failed to open GPIO unexport file");
return -1;
}
fprintf(unexport_file, "%d", gpio_pin);
fclose(unexport_file);
4.6 交叉编译
首先设置交叉编译工具的环境变量,如果需要永久生效,编辑配置文件(如
.bashrc或.profile)。vim ~/.bashrc添加工具链路径,将交叉编译工具的路径添加到系统的
PATH环境变量中:export PATH=/home/ubuntu/luckfox-lyra-sdk/prebuilts/gcc/linux-x86/arm/gcc-arm-10.3-2021.07-x86_64-arm-none-linux-gnueabihf/bin:$PATH- 注意:请根据自己的 SDK 路径填写
更新环境变量,执行以下命令使配置生效:
source ~/.bashrc使用交叉编译器编译程序。
arm-none-linux-gnueabihf-gcc gpio.c -o gpio最后将可执行文件传输到开发板。
scp gpio root@192.168.10.103:/root
或
adb push gpio /- 注意:请根据自己的实际 IP 地址填写
运行程序,修改
gpio文件的操作权限后运行程序。# chmod 777 gpio
# ./gpio实验现象,成功实现电平翻转:
